
Key research focus
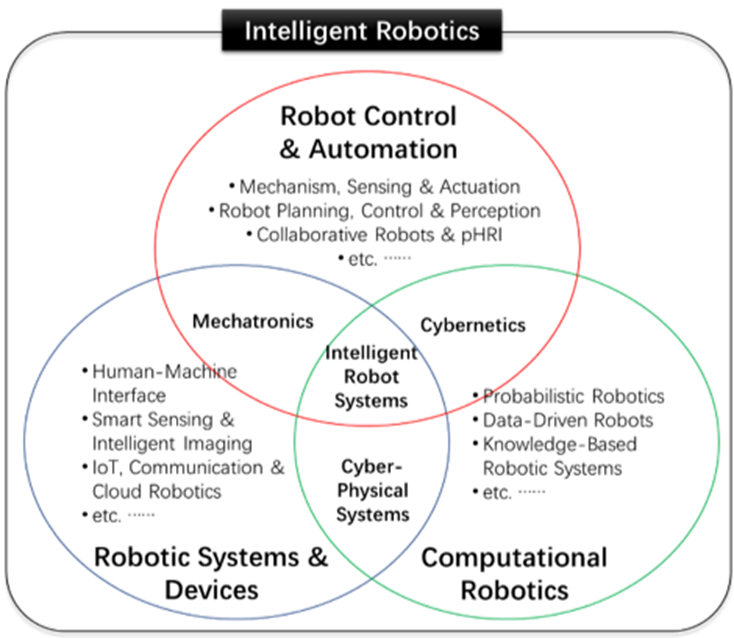
The Center for Intelligent Robotics aims to advance the science and engineering of Robotics with emphasis on intelligent robot systems. By developing our core expertise in three pillars, namely, (A) Robot Control & Automation, (B) Computational Robotics as well as (C) Robotic Systems & Devices, the center hopes to engage actively in frontier research directed towards the development of cutting-edge technology for Intelligent Robot Systems. At the intersections of these pillars are subjects including Mechatronics, Cybernetics and Cyber-Physical Systems which in turn converge towards our focus on Intelligent Robotics. The envisioned areas include, but are not limited to, (i) robot planning, control & perception, (ii) collaborative robots & physical human-robot interaction (pHRI), (iii) human-machine interface, (iv) smart sensing devices & intelligent imaging technology for robotic systems, (v) probabilistic, knowledge-based, data-driven & cloud robotics, etc. Through a multidisciplinary approach encompassing Robotics, Computational Intelligence and Engineering Design, the center hopes foster strong cross-disciplinary research collaboration and synergize faculty expertise towards the area of Intelligent Robotics unique to ZJUI.
Research projects: Representative research projects include, but not limited to, the following: (some examples, to be consolidated and streamlined towards the center vision)
Robotics in HUMAN supervised (CYBER-PHYSICAL) System for Agriculture [1-2]
• Mobile Robotics Platform for Poultry Production
• Mobile Robotics Platform for Plant Factories
• Autonomous Navigation under Plant Canopy

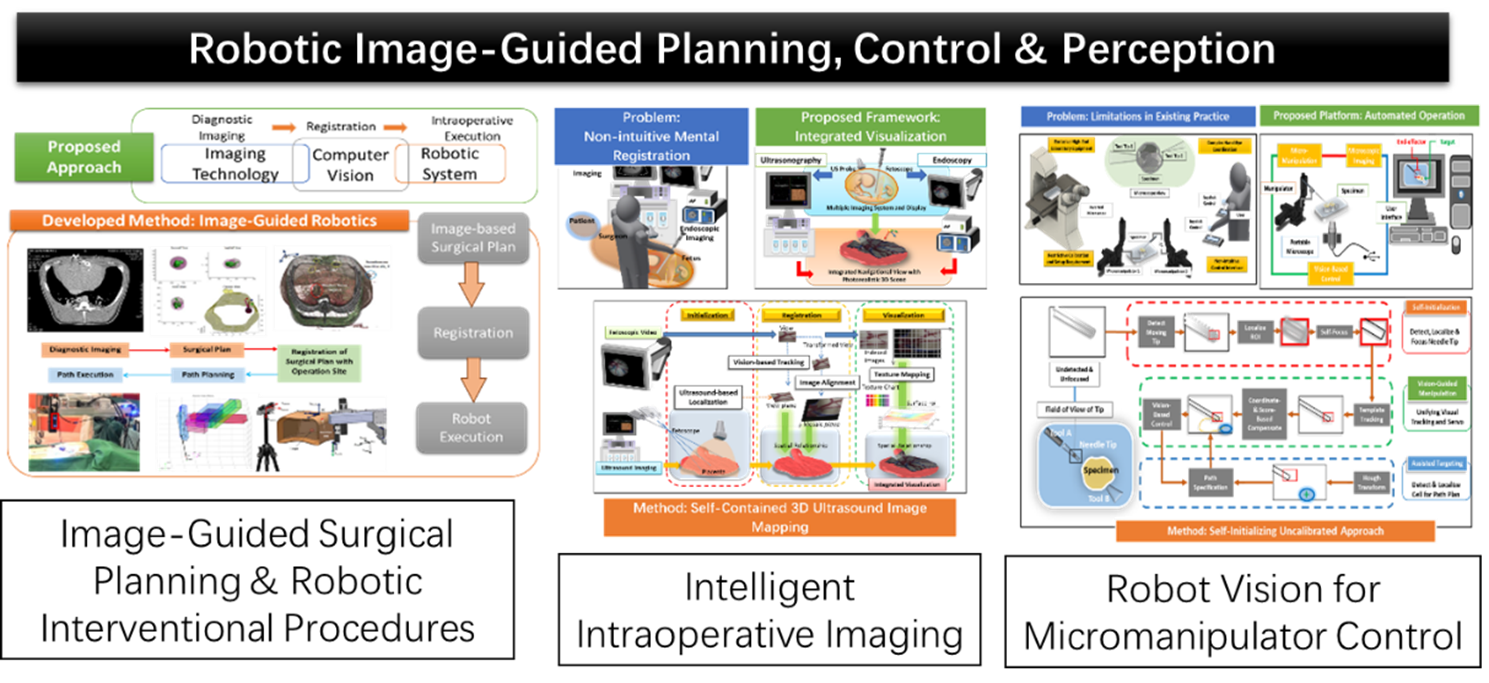
Robotic Image-Guided Planning, Control & Perception
• Image-Guided Surgical Planning and Robotic Interventional Procedures [3]
• Intelligent Intraoperative Imaging [4-7]
• Robot Vision for Micromanipulator Control [8-12]
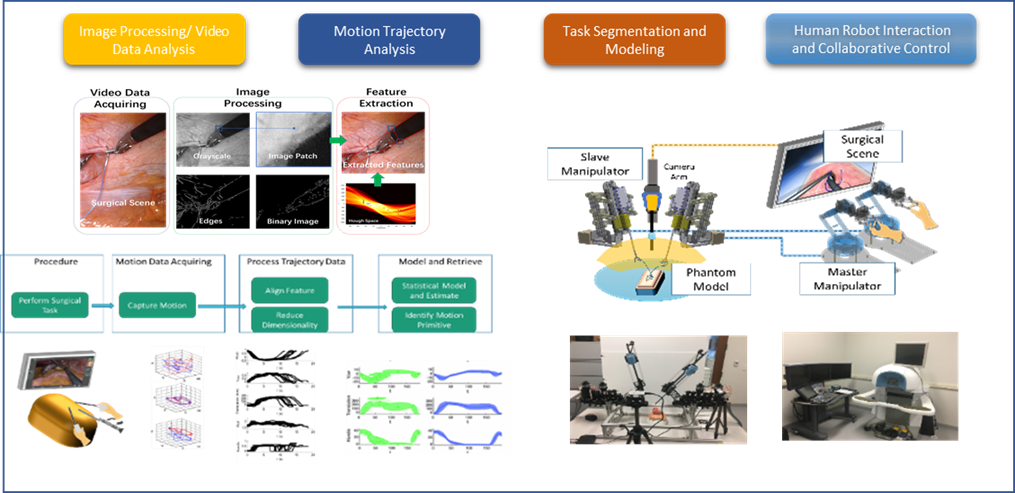
Data-Driven Robot-Assisted Surgical Procedures and Training
• Surgical Video-Data-Driven Trajectory Analysis [13]
• Kinesthetic Training System for Robotic Surgery [14-15]
• Human-Robot Interaction and Collaborative Control [16]
Prospective Scope
Adaptive Cyber-Physical Systems
• Communicating robots in production, e.g. welding robots in car manufacturing
• Cloud-controlled robots in health care at home, in hospitals and rest-homes
• Interaction with non-robotic cyber-physical systems
Field Robotics
• Mobile Robots: Airborne, Underwater, Ground, Wheeled, legged
• Adaptive Robots: Reconfigurable Robots, Soft Robots, Swarm Robotics
The New-Generation Robotics
Bio-robotics, Cyborg, Molecular Robotics, Quantum Robotics





