A research team led by Assistant Professor Shi Ye at Zhejiang University–University of Illinois Urbana Champaign Institute (ZJUI) has reported a major breakthrough in soft robotics, with their latest findings published in Science Robotics. Peng Junbo, a 2022 doctoral student from Zhejiang University and Zhuo Jiangshan, a 2024 doctoral student from Zhejiang University are co–first authors of the study, with Assistant Professor Shi Ye and Prof. Li Tiefeng from the School of Aeronautics and Astronautics, Zhejiang University, serving as co–corresponding authors.
▲
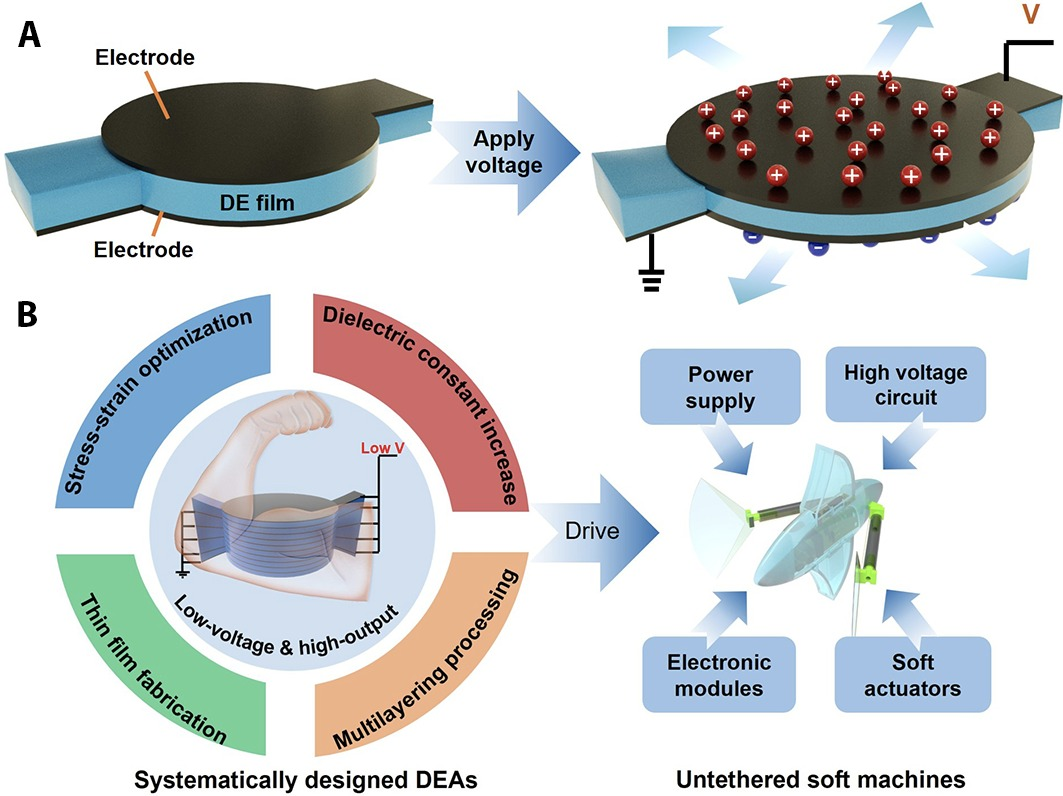
This study addresses a long-standing bottleneck in dielectric elastomer actuators (DEAs): their reliance on kilovolt-scale driving voltages. By reducing the operating voltage for high-performance actuation to a mere 200V, the team bridges the gap between the theoretical potential of DEAs and their practical implementation in untethered soft robotic systems.
▲
DEAs are widely recognized as a highly promising actuation technology, thanks to their large strain, high energy density, and fast response. However, conventional devices typically require several kilovolts to operate, which not only raises significant safety concerns but also relies on bulky external power supplies that limit portability and impede real-world integration.
▲
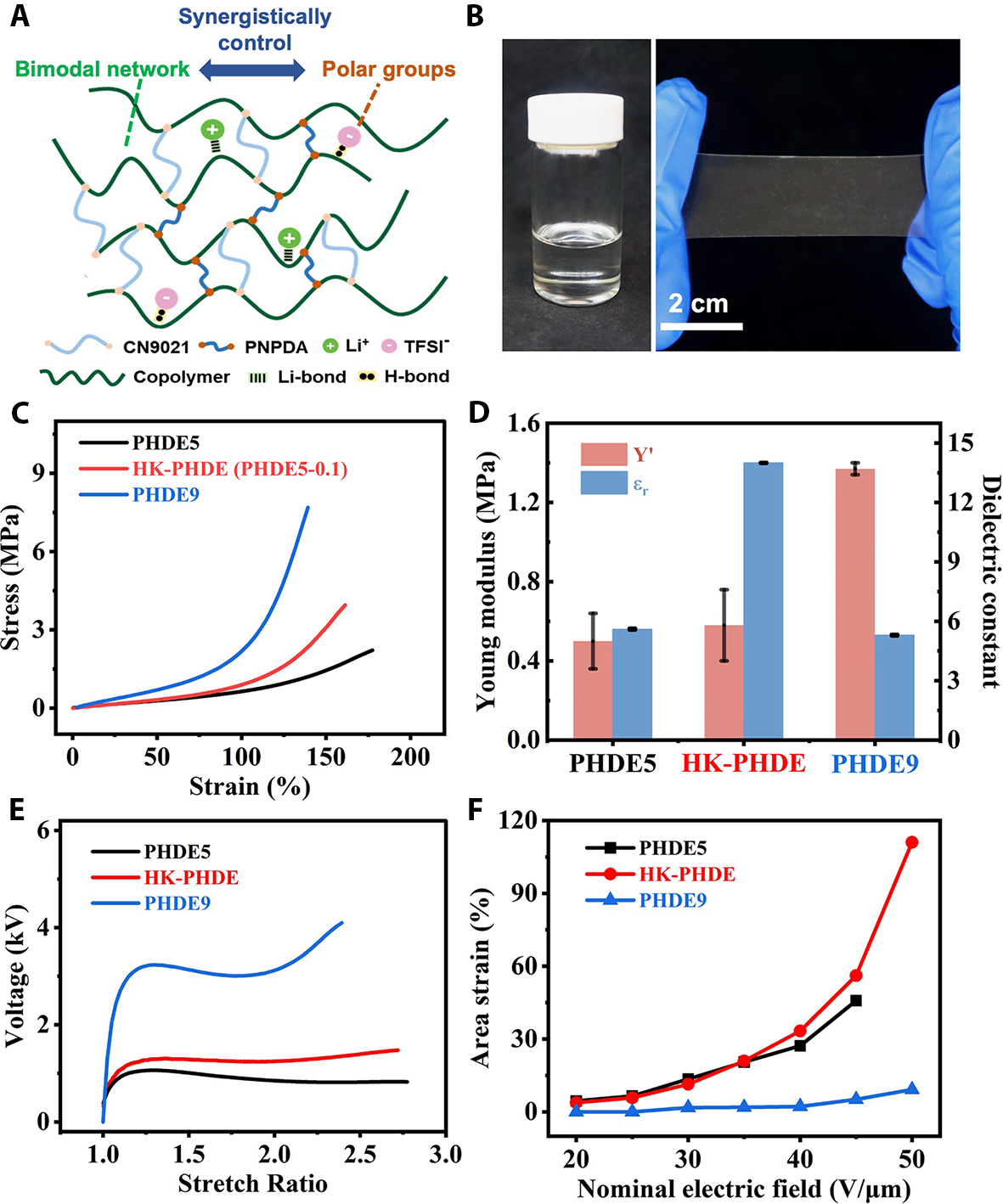
To overcome these critical limitations, the researchers integrated materials innovation with structural and system-level optimization. They developed a high-dielectric-constant elastomer, HK-PHDE, by introducing dielectric additives into a bimodal polymer network. The material exhibits an enhanced dielectric permittivity while retaining low modulus and excellent stretchability, enabling large, stable deformation without the need for pre-strain.
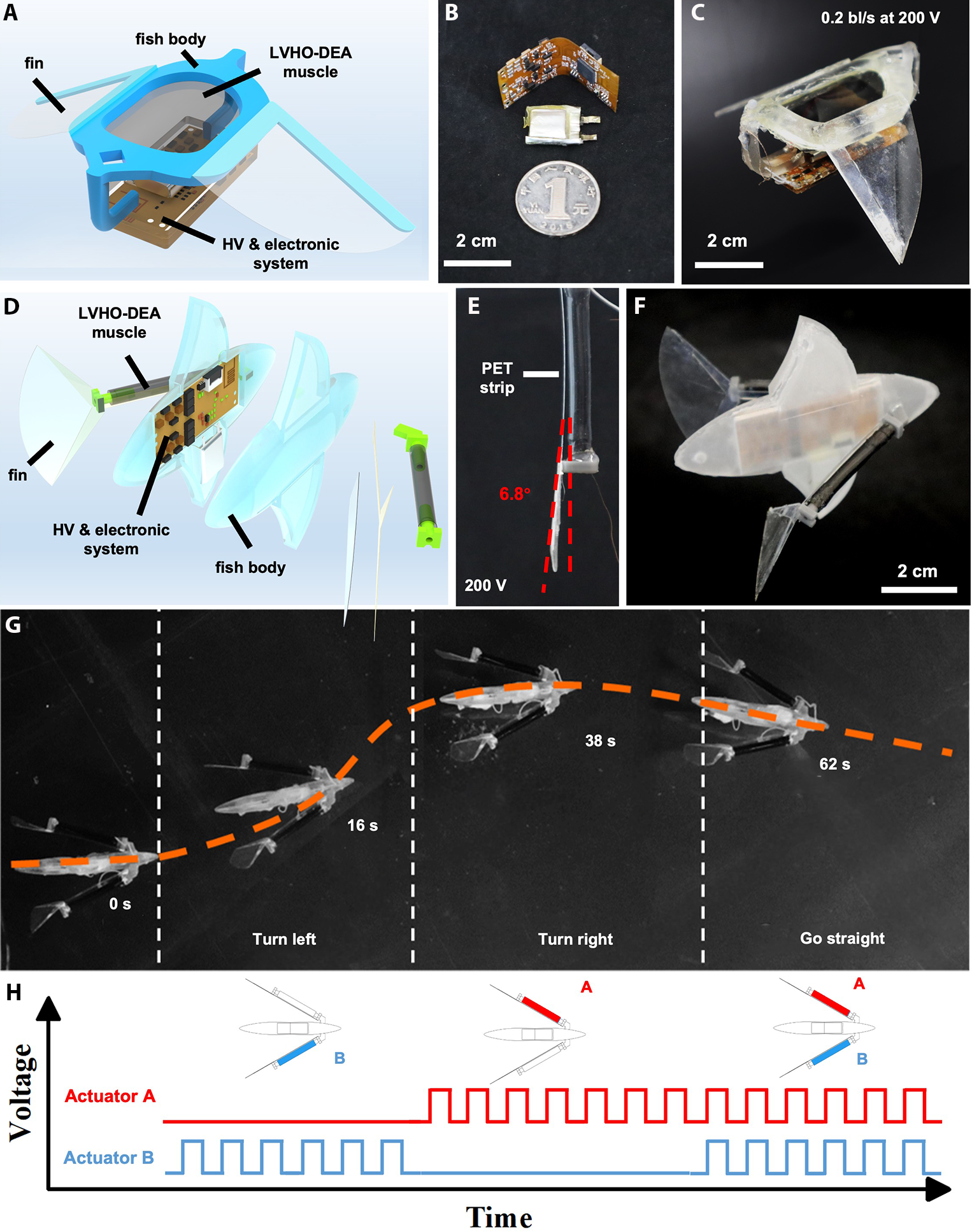
Building on this material platform, the team employed multilayer thin-film structures and ultrathin fabrication techniques to enhance mechanical output while lowering actuation voltage. By integrating compact, flexible high-voltage electronic modules, they demonstrated a series of untethered soft robotic systems operating at approximately 200V, including a wearable fluidic actuation system, a biomimetic robotic fish, and a reconfigurable crawling robot. The overall actuator performance approaches that of natural muscle.
This study systematically resolves the high-voltage dependence that has constrained DEA development for decades, and establishes a scalable pathway covering the full chain from materials design to fully integrated soft robotic systems. Future research will focus on developing highly conductive, low-modulus stretchable electrodes and integrating sensing, computing, and wireless communication modules to realize autonomous, intelligent soft machines for applications in flexible robotics, wearable medical devices, and bioinspired systems.





