近日,浙江大学伊利诺伊大学厄巴纳香槟校区联合学院(ZJUI)研究员、助理教授石烨团队在软体机器人领域取得重要突破,相关成果发表于Science Robotics期刊,由浙江大学2022级博士生彭俊博、浙江大学2024级博士生卓江山担任共同第一作者,共同通讯作者为石烨与浙江大学航空航天学院教授李铁风。该研究成功攻克了介电弹性体致动器(DEAs)长期以来依赖千伏级高压驱动的瓶颈,将高性能驱动电压降至200V,填补了介电弹性体致动器理论潜力与无缆软系统实际应用间的鸿沟。
介电弹性体致动器(Dielectric Elastomer Actuator, DEA)凭借大应变、高能量密度、快速响应等优异特性,长期以来被视作软体机器人领域极具潜力的理想驱动方案。然而,传统 DEA 需数千伏(kV)的驱动电压,不仅存在显著的安全隐患,还需配套笨重的高压电源系统,严重制约了其在无缆软体机器人等场景的实际应用。针对这一核心痛点,研究团队从材料、结构与器件三个维度开展协同优化,全面提升器件综合性能:在材料层面,通过调控材料的应力-应变行为与机电响应特性,提升介电常数以从根源上降低驱动电场需求;在结构层面,设计多层堆叠结构以显著放大器件整体机械输出;在器件层面,通过制备超薄膜结构进一步压低驱动电压。与此同时,团队针对无缆软体机器人的集成应用需求,完成了电源、高压驱动电路与控制模块的高度集成,实现了驱动系统的微型化与柔性化设计,为该技术从实验室研究走向工程化实际应用奠定了核心基础。
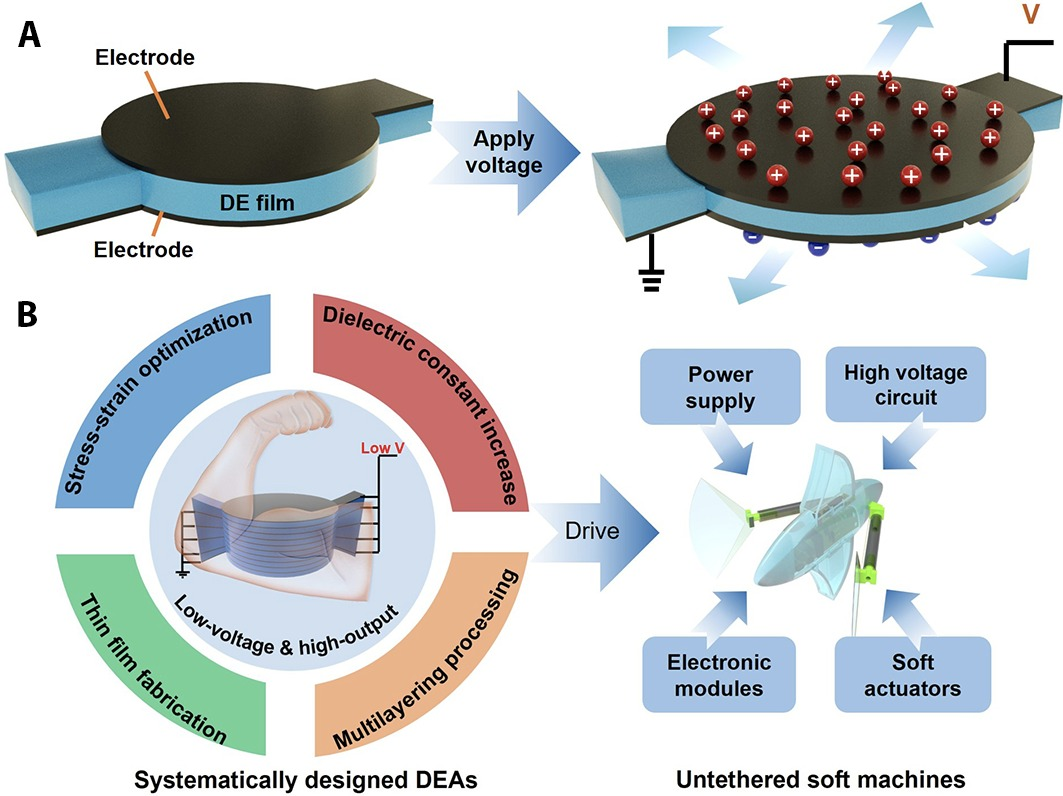
▲介电弹性体致动器工作机制与低电压化整体策略
在材料方面,研究团队通过引入适量介电功能添加剂、结合双峰交联网络结构的协同调控策略,成功开发出高介电常数弹性体材料HK-PHDE。该材料在显著提升介电性能的同时,仍保有低模量、优异拉伸性与稳定的力学行为,最终实现了无需预拉伸即可稳定驱动的大变形输出。
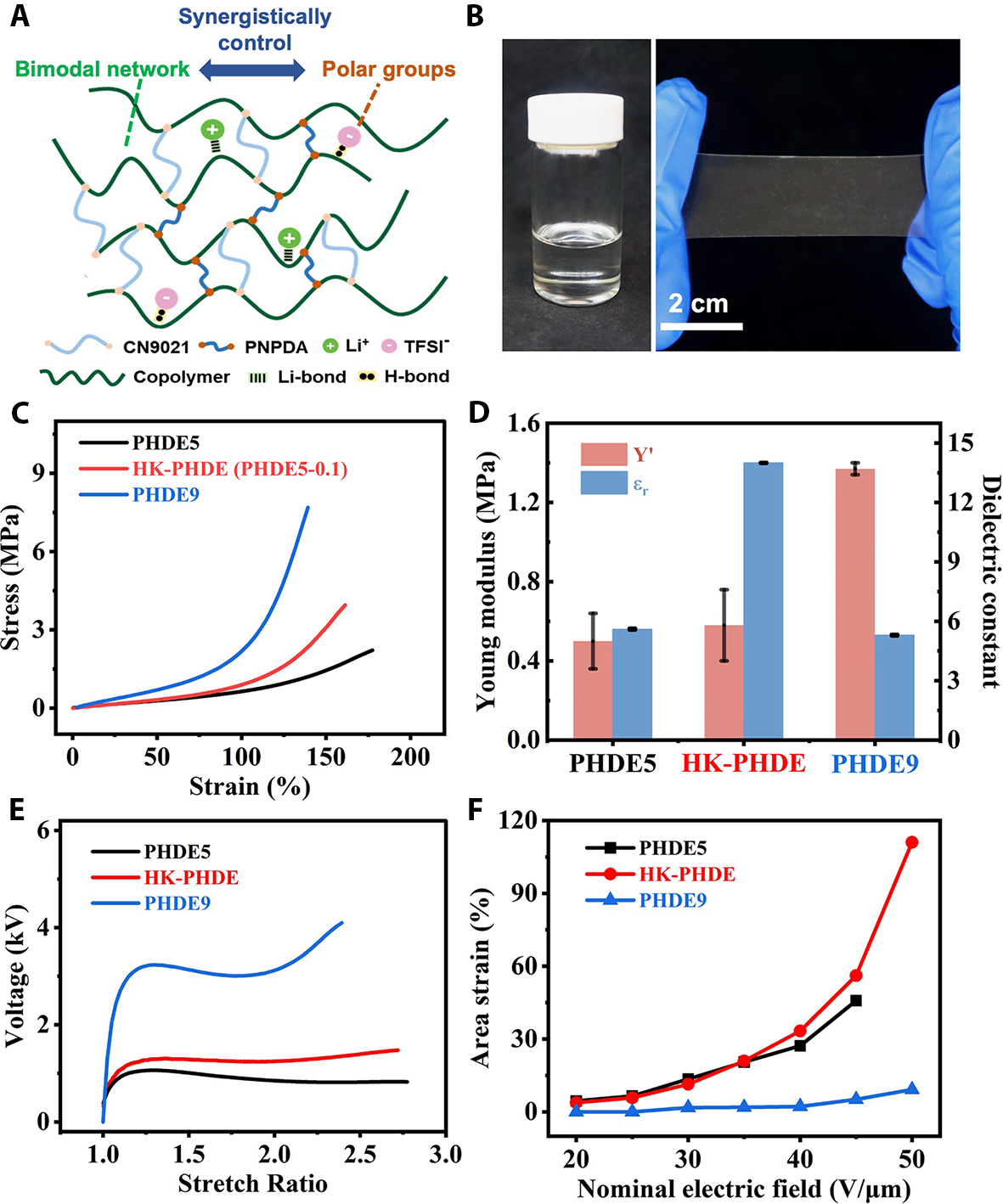
▲新型介电弹性体HK-PHDE的合成与性能优化
基于上述 HK-PHDE 材料,研究团队构建了多层薄膜致动器。该致动器在不提升单层驱动电压的前提下,实现了输出力、能量密度与功率密度的显著提升,综合性能已接近天然骨骼肌水平。在此基础上,团队进一步融合超薄多层结构设计与定制化柔性高压电子模块,成功研制出多款可在200V左右低电压下稳定运行的无缆软体机器人,涵盖可穿戴流体驱动系统、仿生机器鱼、可重构爬行机器人等典型应用场景。该工作完整验证了从材料设计、器件制备到整机集成的全链条技术路径,为低成本、桌面级软体机器人的工程化落地与实际应用提供了可行的技术方案。
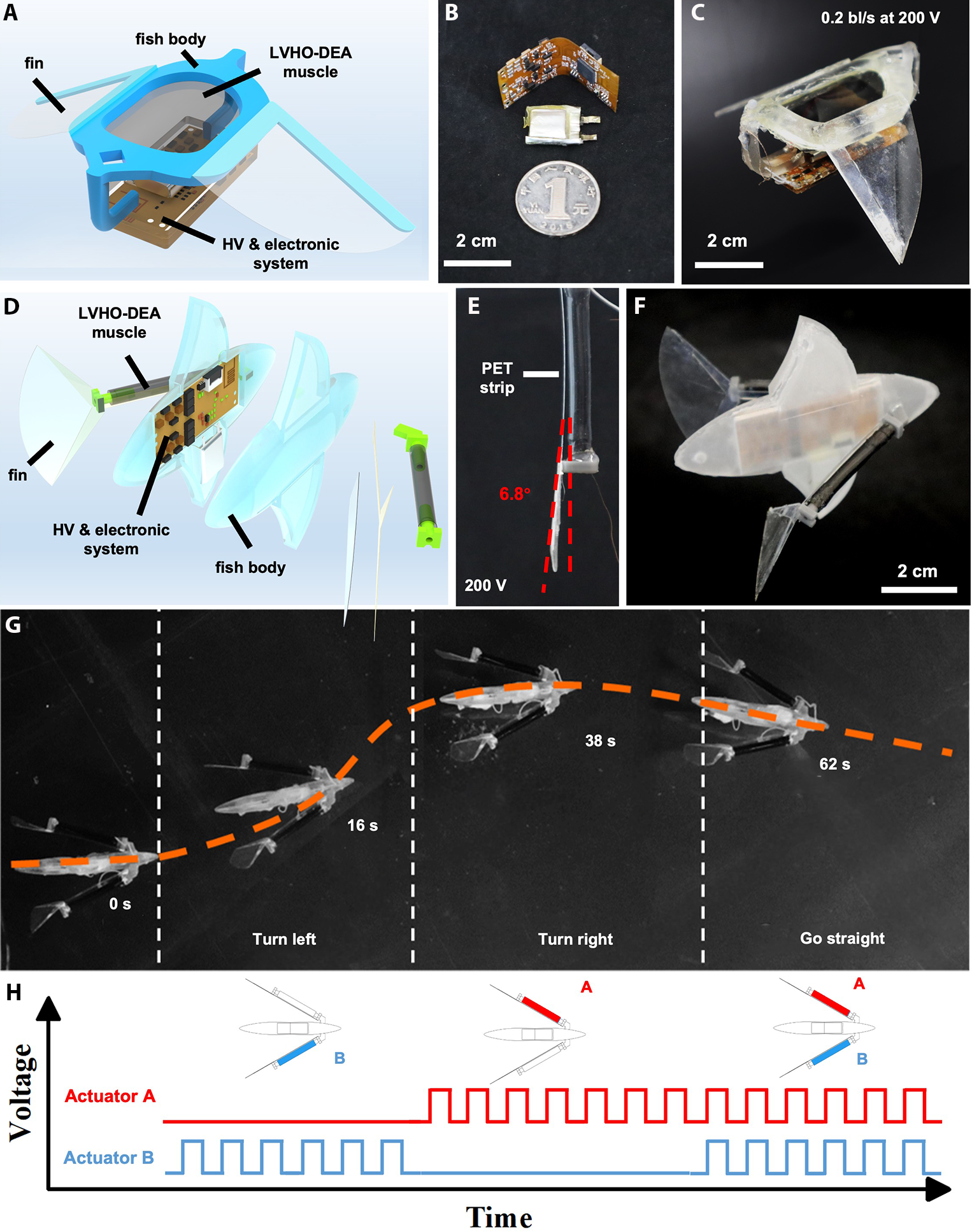
▲200V低电压无缆软体机器设计
本研究针对介电弹性体致动器长期受制于高驱动电压的核心瓶颈,通过材料创新与工艺优化的双重突破,系统性解决了其高电压依赖的行业难题,首次实现了200V低电压条件下高性能无缆软体机器人的系列化开发。其中,自主研发的新型HK-PHDE材料同时兼顾了高介电常数、优异力学性能与良好加工适配性;优化改进的干法堆叠工艺,实现了多层薄膜致动器的规模化可控制备;而柔性紧凑型高压电子模块的集成设计,则最终完成了从材料设计、器件制备到整机系统集成的全链条自主创新。
未来,研究团队将在现有工作基础上,围绕两大核心方向持续深化研究:其一,聚焦研发高导电性、低模量的新型可拉伸电极,进一步降低致动器的驱动阈值,持续突破器件性能瓶颈;其二,推进传感单元、数据处理模块、通信模块与 LVHO-DEA 驱动的无缆软体机器人系统的深度集成,实现设备的原位环境感知、自主智能决策与闭环任务执行。在此基础上,持续推动介电弹性体致动器技术在柔性机器人、可穿戴医疗设备、智能仿生装备等领域的规模化落地与更广泛应用。





