浙江大学伊利诺伊大学厄巴纳香槟校区联合学院(ZJUI)院长李德纮院士领衔建设的两大科研平台 ——“综合交通一体化理论与关键技术平台” 与 “多式联运物流大模型浙江省工程研究中心”,长期深耕于港航多式联运物流、智慧交通、公交运力共享及低空物流等方向的技术研发领域。近日,李德纮院长带领一支由教授、博士后、研究生构成的 55 人跨学科团队,在复杂城市低空环境下的无人机起降场建设与空地一体化协同技术方面取得阶段性突破,为低空物流通用基础设施建设提供了具有落地潜力的 “浙江方案”。
技术攻关:打造“航空+低空"浙江方案
依托上述两大平台的学科交叉优势与工程化落地能力,团队近年来在低空领域布局并开展了一系列具有前沿创新性的研究项目。其中代表性工作包括 “城市规模化无人机航迹时空域高效管控方法与系统研究”以及 “无人机与车路协同系统空地一体化深度耦合机制研究”。在项目中,团队构建了低空物流综合管控与仿真平台,对复杂城市空域进行全流程建模、仿真验证与安全评估,为技术迭代与工程化落地提供了有力支撑。与此同时,团队深度参与国家百亿级示范工程 —— 圆通嘉兴全球航空物流枢纽建设,推动科研成果快速转化落地,率先构建起 “航空 + 低空” 立体物流的 “浙江方案”。基于这些研究成果,团队在无人机接入适配、运行动态管理、地面联运高效衔接等关键环节实现了多项核心技术突破。尤为突出的是,在起降场模块化设计、多机型兼容性适配、换电换仓协同调度等方面的突破,为低空物流从“小规模试验” 向“示范化运营、工程化推广”的跨越,奠定了坚实技术基础。
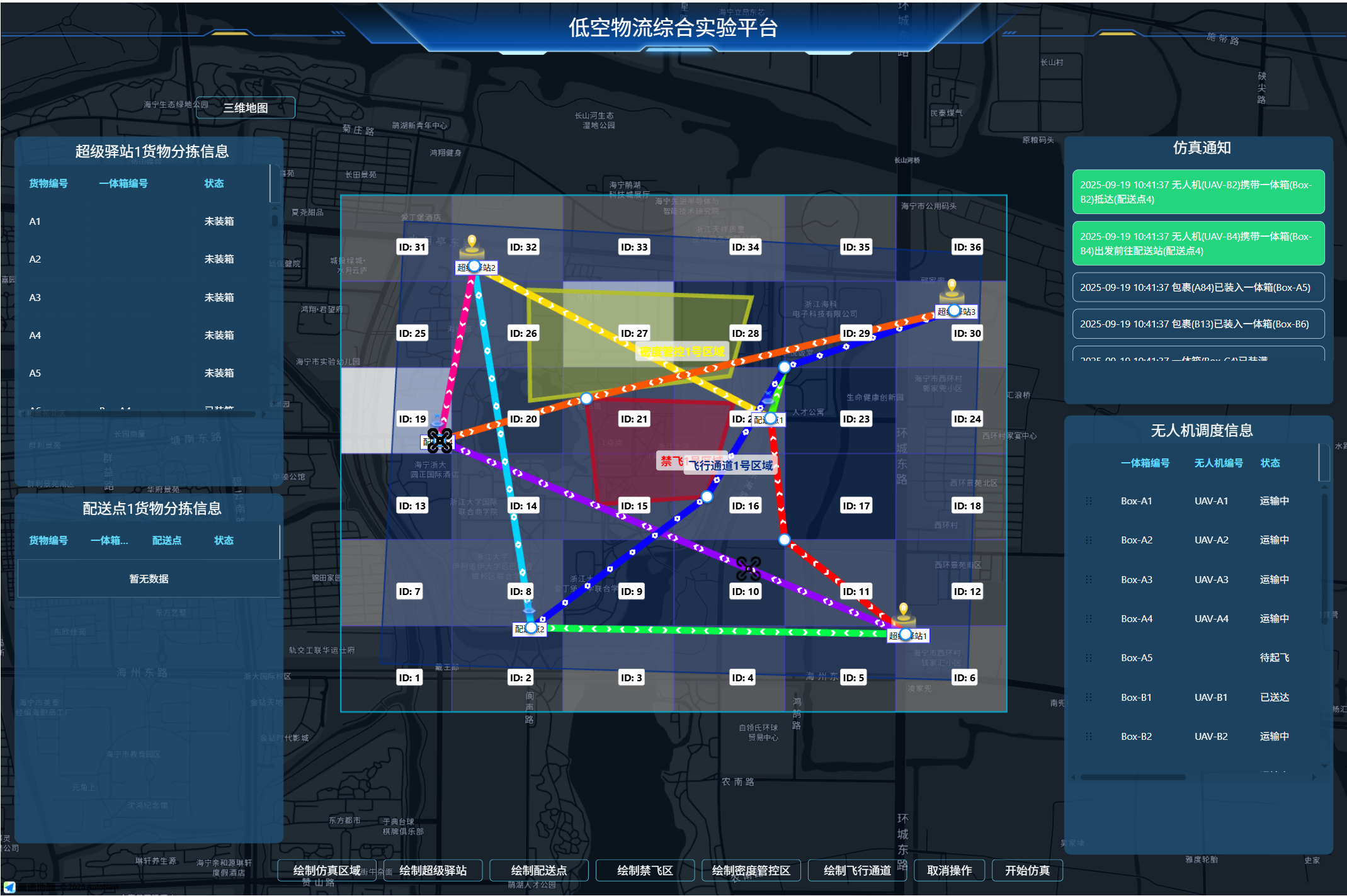
▲低空物流综合管控与仿真平台
四大痛点:低空物流落地的核心瓶颈
当前低空物流要规模化落地,仍面临四大核心瓶颈:一是互通难,异构无人机之间存在通信协议差异,感知与引导能力参差不齐,协同管理复杂,给统一编队与调度带来挑战;二是互享难,换电与换货环节未能实现同步协同,换电与换货分离导致整体周转效率难以提升;三是互联难,空地联运环节中自动化装卸与动态调度技术尚不完善,装卸效率与联运衔接能力不足;四是互融难,无人机起降平台在模块化设计与兼容性方面仍有欠缺,难以兼容多型号、多任务的异构无人机系统。
科研突破:智能起降场与空地一体化协同
围绕解决上述“四难”问题,中心聚焦“无人机智能起降设备+空地一体化物流网络”技术体系构建,提出并重点攻关四项关键技术:一是异构无人机统一接入与自主飞行控制技术(简称“统一接入”),可实现对不同厂商、不同通信栈无人机的统一感知与安全接入,保障其在复杂空域的稳定自主运行;二是无人机一体化换电换仓技术(简称“二合一仓”),通过换电与换仓的协同作业,有效提升无人机地面周转效率、缩短地面作业时间;三是空地一体化物流网络动态调度技术(简称“动态调度”),创新提出适配城市多点多模式的在线调度算法,支持任务的快速响应与灵活重排;四是可扩展4×N无人机起降平台设备(简称“起降设备”),采用模块化、可扩展硬件设计,既能兼容多型号无人机,又能支持并行作业,打破设备适配局限。
上述四项技术将共同构成低空物流通用基础设施技术体系,为示范应用落地提供核心支撑。目前已形成一套模块化多式联运无人机起降设备,该设备在兼容性、作业精度与运能提升上展现出突出的工程化实力:可兼容国内外三类及以上主流无人机品牌,解决异构设备适配难题;支持可扩展的十六架无人机并行起降,且充换电机械臂定位精度达≤2毫米,确保换电换仓作业高速稳定;在城市特急件运输场景中,整体运输时长较传统模式缩短≥60%,显著优化末端时效与周转效率。依托这一成果,由ZJUI牵头,联合圆通速递、浙江大学湖州研究院和北航国际创新研究院,构建起产学研深度协同机制,共同打造未来低空物流起降场示范体系。
未来愿景:标准引领与产业化推广
未来,依托 “综合交通一体化理论与关键技术平台” 及 “多式联运物流大模型浙江省工程研究中心” 两大平台的科研创新能力与产业联动资源优势,团队将持续深化低空物流关键技术研究、扩大联合示范应用规模、推动低空物流通用标准制定与工程化落地,为低空经济发展与城市多式联运体系建设提供高质量有力支撑。同时,团队期待与更多高校、科研机构及产业伙伴携手,加快技术验证与应用推广,共建安全、高效、可持续的城市低空物流新生态。





