3月4日晚,北京冬残奥会开幕,各国(地区)的运动员们带着奥林匹克精神展开激烈角逐。总有一场比赛或一个瞬间,会触动了你的心灵。
这些年,ZJUIer也一直关注着这样一些有需要的群体,希望为他们的生活带来一些便利……
一起看看这些年ZJUIer,做过哪些“关怀设计”吧~
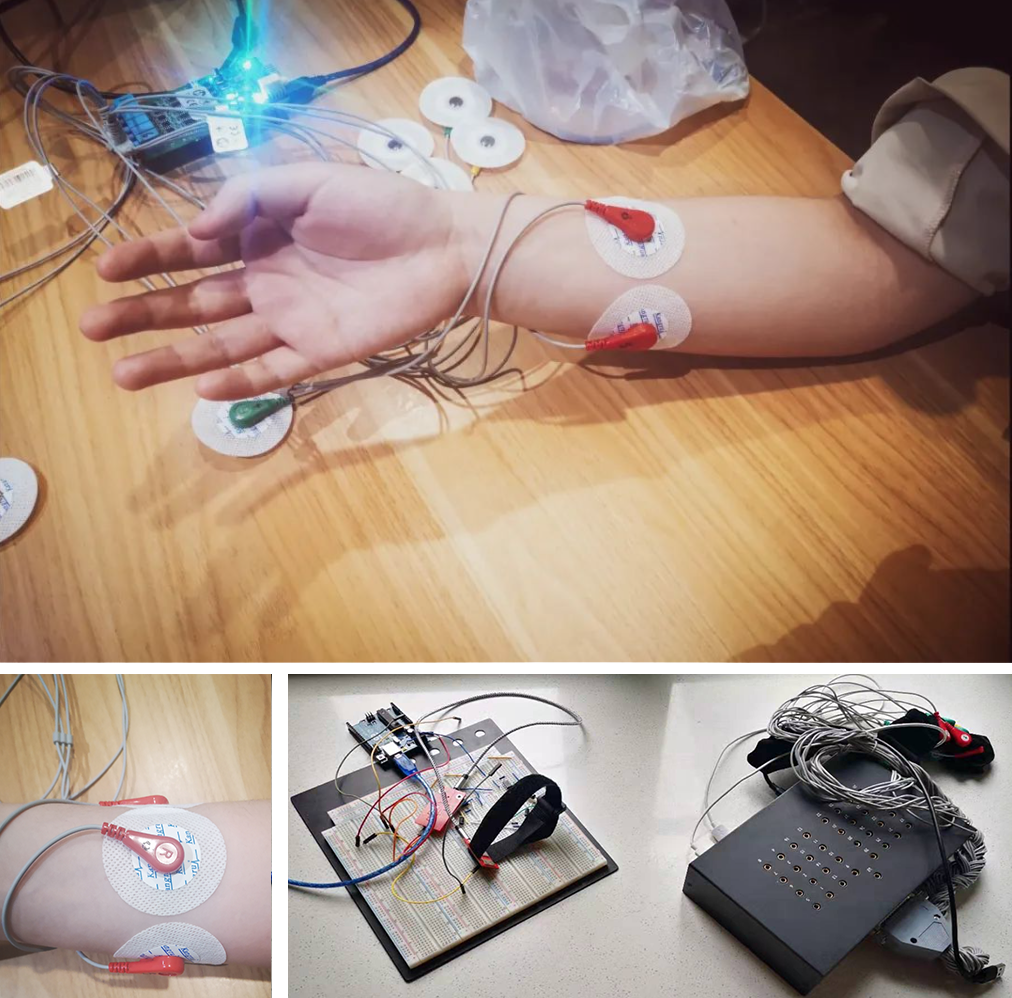
基于肌电信号的智能可穿戴设备研究
Research on wearable devices based on surface EMG signals
项目组:肖树鸿、虞越、郑秀文 (18级);指导老师:王宏伟
该项目组的同学们关注到了日趋增长的中国脑中风偏瘫患者,旨在设计出一种基于手部表皮运动神经的电位解码信息而做出强化反应的可穿戴设备,来使手部偏瘫患者进行有效的康复训练。根据反应特定行为意图的大脑皮层运动神经元信息与手部表面神经肌电信号之间的关联性,通过解码手部表面多个特定部位的肌电信号获得相应的动作意图,从而建立相对精确的对应关系,并借由该设备来辅助强化,最终使患者能够借助此设备自主完成相对困难的动作以达到治疗康复和正常生活目的。
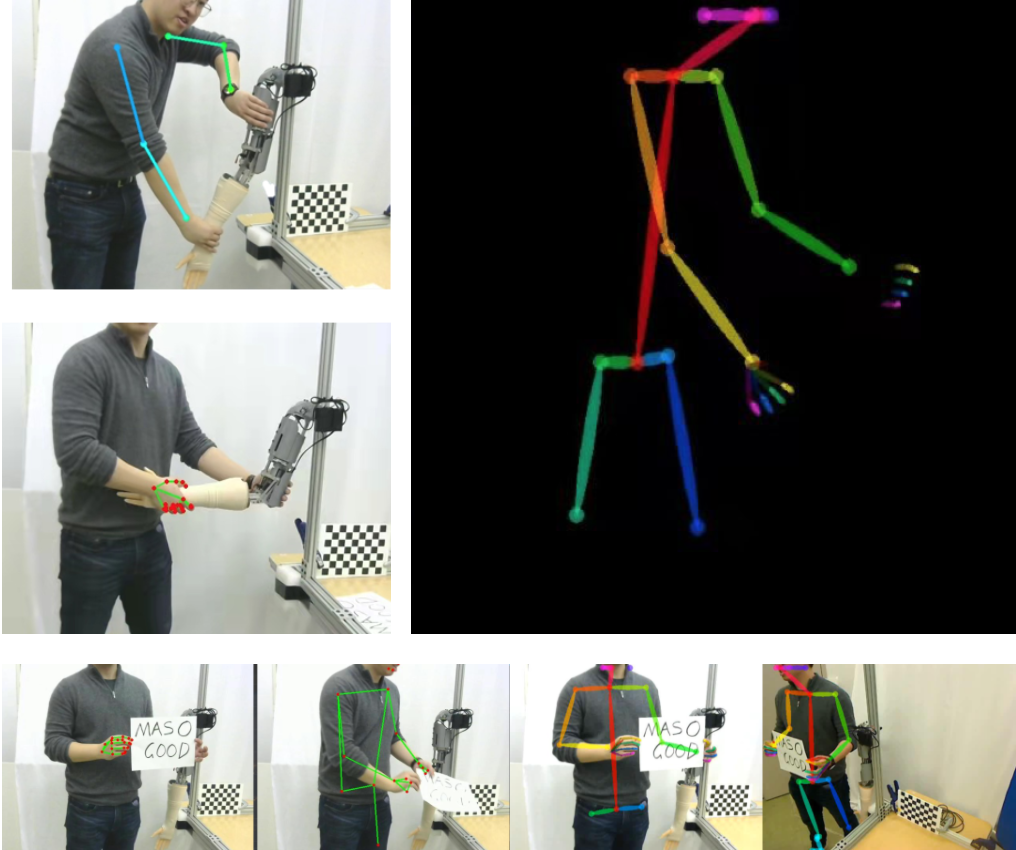
用于机器人模拟运动神经疾病诊断能力训练的视觉传感
Camera-based Sensing and Visual Analysis for Robot-Simulated Neurological Examination Training
项目组:郑天响、周芃旸、苏好予(18级);指导老师:杨量景
该项目包括基于摄像机的无标记运动捕捉系统的开发,以执行视觉分析。其目的是开发用于神经系统检查训练的机器人模拟器的传感和分析能力。在记录和分析临床医师学习者与培训模拟器的互动后,项目组基于大量的临床视频数据,为临床医师学习者提供评估,使测试结果更加高效和准确,帮助完成机器人模拟神经检查训练。
他们完成了对双眼相机的相机参数标定和矫正,实现了通过双眼相机初步恢复三维信息;实现了对机械臂上臂部分的有效识别和追踪。并且在整个运动过程中有着相对良好的鲁棒性;成功从单个相机的视频图像中通过多种方法提取实验者的人体骨架信息,也完成了对研究员手部动作的提取。

机器人模拟诊断训练器
Biomechanical Design and Clinical Evaluation of an Ankle-Foot Simulator for Ankle Clonus Assessment Training
机械设计:韩天屹 (17级);指导老师:杨量景、Elizabeth T. Hsiao-Wecksler
在该项目中,韩天屹承担了模拟临床诊断训练的机械腿设计制作工作,该模拟器在台式测试和临床医生评估中均得到有效验证,能为医学生提供重复训练的机会,有效助力踝阵挛诊断技巧提升。同时,依托此项目,他以第二作者身份在机器人领域顶级国际会议IEEE ICRA上发表了论文《Biomechanical Design and Clinical Evaluation of an Ankle-Foot Simulator for Ankle Clonus Assessment Training》,论文也同时被IEEE RA-L期刊收录。

手术机器人结构设计
Design Optimization of a Mechanically Constrained Re-Localizable Remote-Center-of-Motion
项目组:谭安琪、陈圣伟、甘涵宇(18级);指导老师:杨量景
微创手术具有创伤小、风险低、恢复快的特点。特别是由医生远程操控,机械臂进行手术,电脑辅助控制的机器人辅助手术系统,它降低了医生长时间手术时产生疲劳与颤抖的风险,在近十年了得到了不断地发展。疫情期间,这一无接触手术模式更是得到了推崇。由ZJUI机械专业18级学生自主设计的机械结构成功地将远端运动中心限制于空间的一点上(即将手术机械臂的穿刺点限制于病人腹部的一个小范围内),并对其进行电脑辅助模拟,在一定程度上为病人减少风险。利用遗传算法进一步优化,最终得出兼具工作空间与可达深度的最优机械参数组合。他们的成果也IEEE Advanced Robotics and Mechatronics国际会议上发表。
增强现实内窥镜机器人
Research on wearable devices based on surface EMG signals
项目组:宗振宇(17级)、王腾悦(17级、硕士1年级);指导老师:杨量景
该项目组的同学们针对微创手术中内窥镜成像视野受限等问题,提出了结合混合现实技术与机械臂精密控制的医疗辅助系统。该系统根据患者术前采集的相关信息,在3D开发平台中建立相应的模型,并结合混合现实技术以达到术中为外科医生提供更加全面具体的视觉信息和更便捷准确的操作。同时,该系统采用机械臂控制内窥镜移动的手段,做到了数字化操作,并通过一系列算法, 在满足微创手术运动限制条件的同时,为医务人员提供了更加稳定可靠的内窥镜姿势。

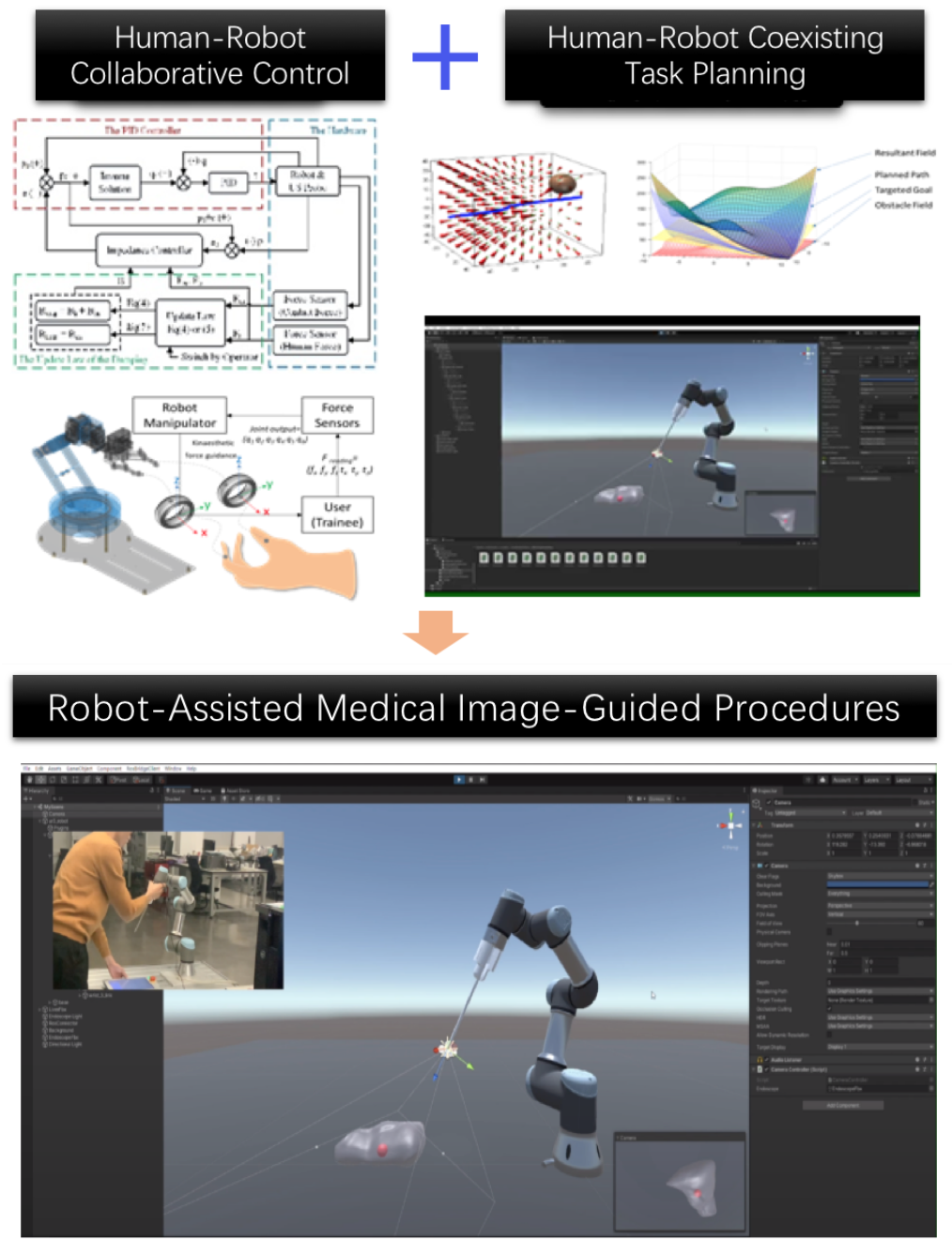
超声机器人
Visual Optimization of Ultrasound-Guided Robot-Assisted Procedures Using Variable Impedance Control
项目组:肖松杰(博士3年级);指导老师:杨量景
超声扫描术已成为了日常生活中最常见的一种诊断和术中成像的手段,而超声图像的质量很大程度上依赖于医生的经验技巧。高强度的工作量使得超声医师面临着一些疾病的风险,例如局部的疼痛,肌骨失常等。这是因为他们在诊断过程中需要长时间在病人体表施加显著的力来获得一个清晰的图像。
为此我们提出了一个利用可变阻抗控制的机器人控制系统来优化超声图像的成像质量。这个人类-机器人-环境三者交互的系统能够在与人合作交互的同时,控制机器人与环境保持一个恒定的接触力。超声的机器人解决方案不但能够缓解外科医生高强度的多任务需求的压力,(例如在超声引导经皮介入治疗中),而且能够提高超声采集程序的可重复性,使得尺寸测量可以在以后精确地重现。
另外我们也正致力于将触觉反馈加入到机器人辅助远程超声扫描术中,这将会为医生提供一个同时包含视觉和触觉的更全面的感知能力。而且机器人的遥操作能力允许专家远程为病人做检查,对于不方便来医院或者医疗资源落后地区的病人来说是一个福音。这也减少了与病人的直接接触,能够有效减少医护人员被感染的风险,尤其在如今新冠病毒盛行的时期显得尤为重要。
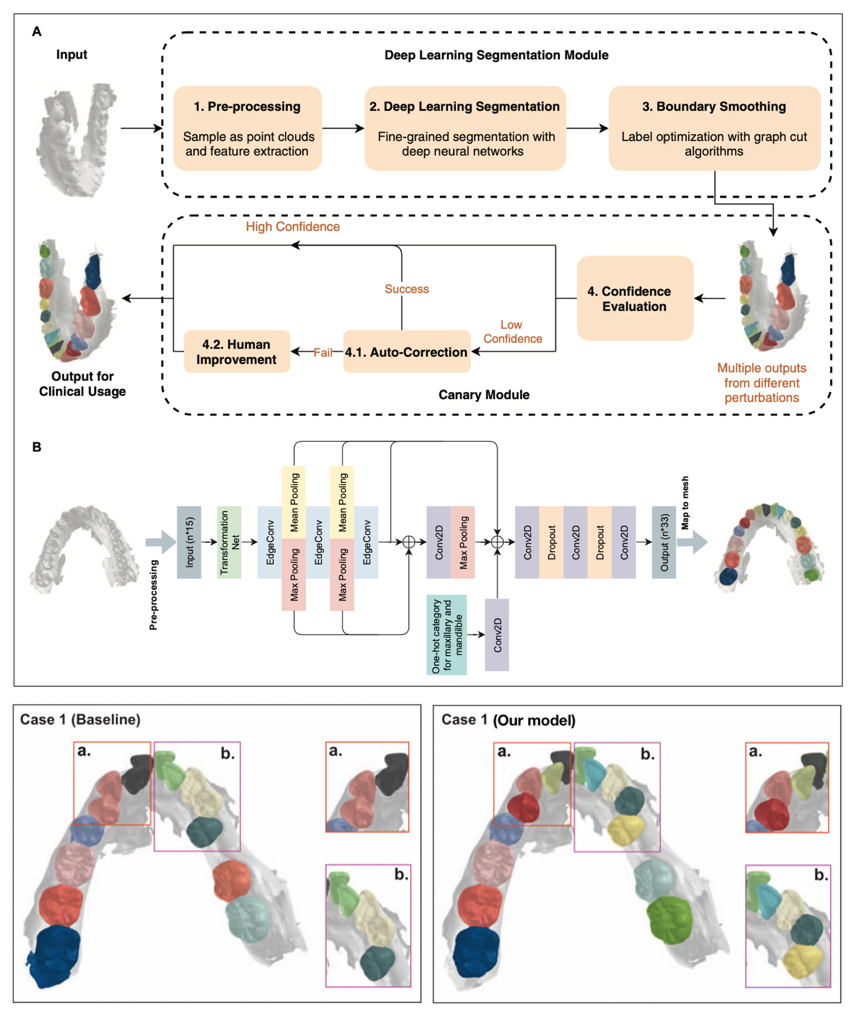
基于深度学习的三维口扫数据临床可适用语义分割算法
Clinically Applicable 3D Tooth Semantic Segmentation in Intra-Oral Scans with Deep Learning
项目组:熊慧敏(2021级博士)、何晓轩(2021级硕士)、陈睿哲(2021级硕士);指导老师:刘佐珠
三维口扫(Intra-Oral Scan, IOS)数据指的是通过扫描患者口腔内部获得的牙齿、牙龈、黏膜等软硬组织表面三维形貌和纹理结构信息,将IOS数据中的每个网格面片(face)准确分类为对应的牙齿或牙龈,是许多数字化口腔诊断治疗(如错颌畸形等)的关键步骤。然而,在实际诊疗过程中,病人口扫数据随个体而异,具有多样性、异质性;且常伴有不同的临床病征,如牙列拥挤、牙齿缺失、边界不清等;模型扫描过程中也常引入噪声,都给此任务带来巨大挑战。
为此,我们基于图神经网络深度学习算法和贝叶斯统计模型,提出了面向大规模、高精度、异质化三维口扫数据的临床可适用语义分割框架,可以纠正先前算法的不足,如无法分辨出特征相似的相邻牙齿,萌出牙识别,分割不完整等,极大地提高了分割精度和效率。同时,我们进一步提出一种新的三维点云自监督学习框架,在使用极少量有标签数据的情况下超过了原始有监督算法的性能,可以极大减少对耗时人工标注的需求。我们的算法在临床可适用性测试中获得了医生的一致认可,目前已经成功部署在临床诊疗软件中为国内外口腔病人提供智能医疗服务。相关成果发表于口腔医学顶级期刊Journal of Dental Research,医疗影像处理顶级会议Medical Imaging with Deep Learning等。
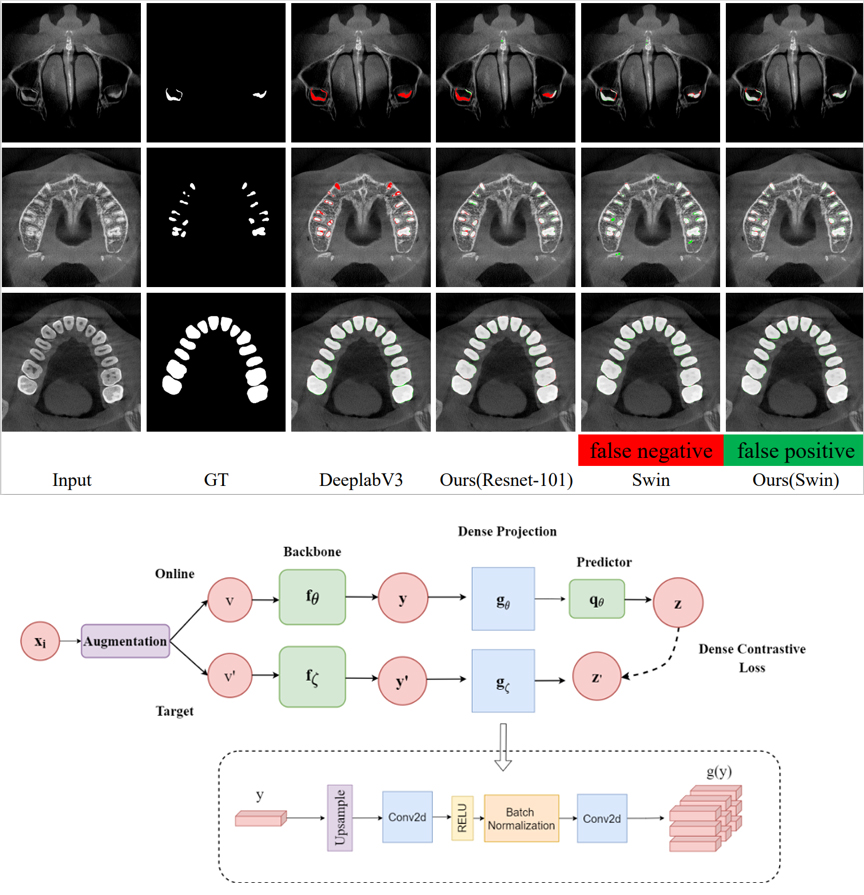
基于自监督学习的CBCT语义分割算法研究
Self-supervised Learning for Cone Beam CT Semantic Segmentation
项目组:马健涵(17级)、朱豪强(17级);指导老师:刘佐珠
口腔锥形束CT(CBCT)图中牙齿图像的精准识别对于口腔模型3D图像重建以及后续的诊疗方案设计至关重要。但即使对于训练有素的口腔医生来说,标注CBCT图像仍需要消耗大量的时间成本。该项目组的同学致力于开发一种针对CBCT图像的语义分割模型框架,提升口腔医生工作效率。他们提出了一个新的自监督深度学习框架,先通过大量无标注样本无监督预训练,再用少量带标注样本进行微调,取得了比用同样数量的标注样本进行有监督学习的模型更为优越的分割效果,为减少开发CBCT分割模型所需要的人力标注提供了一种可行的解决方案。
以工程改变未来 以真心温暖世界
今后,我们也将继续秉持人文关怀
为创建更好的、更和谐的人类命运共同体
书写ZJUI的
浅浅一笔





