On Aug 23, 2022, the Center for Adaptive, Resilient Cyber-Physical Manufacturing Networks (AR-CyMaN) successfully organized a special session on Adaptive and Resilient Cyber-Physical Manufacturing Networks in the 18th IEEE International Conference on Automation Science and Engineering (CASE 2022).
▲ Program of the Special Session
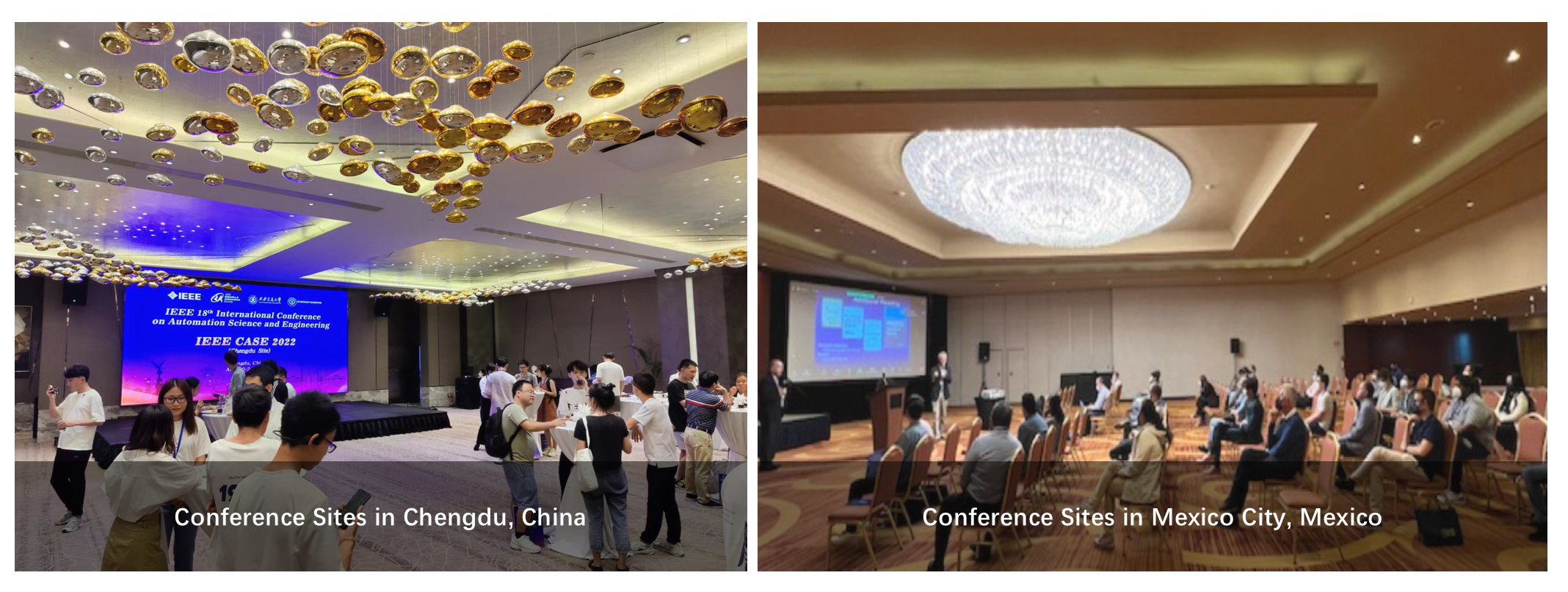
▲ Conference sites in Chengdu & Mexico City
CASE 2022 is the flagship conference of the IEEE Robotics & Automation Society, which provides a primary international forum for automation researchers and practitioners to present and discuss their work. This year, the conference was held in Mexico City with a satellite site at Chengdu, China and a hybrid online platform to accommodate participation from all parts of the world.
Initiated by the center’s leading researchers, this special session aims to encourage more interesting research based on the collaborations between the center’s members, and is dedicated for exchanging wonderful ideas on adaptive and resilient cyber-physical manufacturing networks. It explored frameworks that make advanced manufacturing more capable, accessible, and democratic to spur innovation and enterprise. Specifically, we aim to consider: (1) Interactions between autonomous hardware and software to produce verifiable and safe manufacturing processes; (2) The curation and use of networks and data to optimize performance; (3) Continuous analysis and learning for both low- and high-level decision-making and control; and (4) On-the-fly adaptation to changing needs and detected errors or risks to ensure resilience.

▲ Papers presented in the special session
This special session was chaired by Prof. Hongwei Wang and co-chaired by Asst. Prof. Liangjing Yang, who are the Lead and Colead of the Center for Ar-CyMaN, respectively. Featuring six exciting presentations, the session was filled with fruitful exchange of comments and active discussion amongst conference attendees around the world gathered in Mexico City, Chengdu City and Online platform.
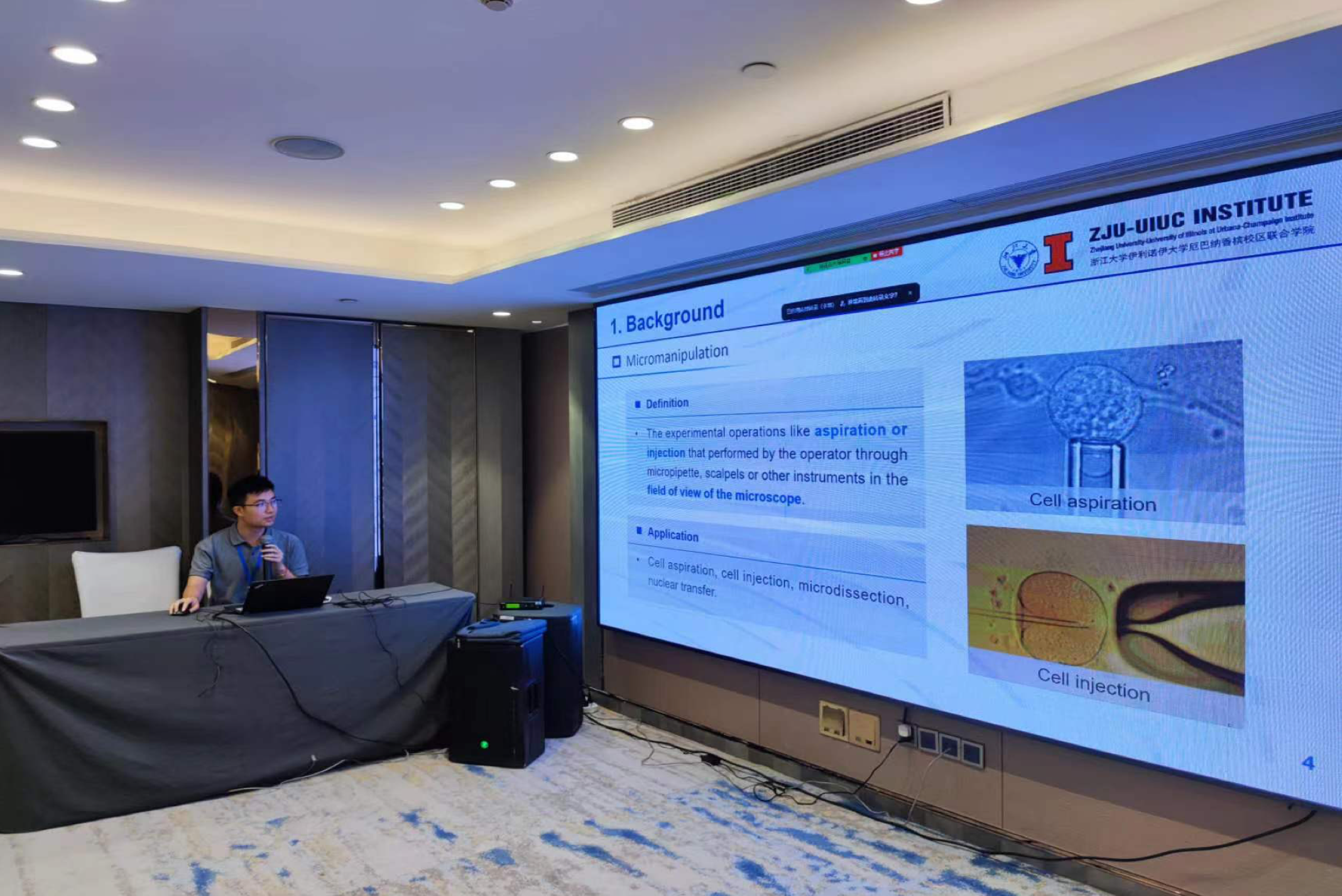
▲ WANG Tiexin( 2nd year PhD Student)'s Presentation:Self-Recalibrating Micromanipulator System for Resilient Robotic Vision-Based Control;He was also the 1st author of the other special session paper "Universal Self-Calibrating Vision-Based Robotic Micromanipulator"
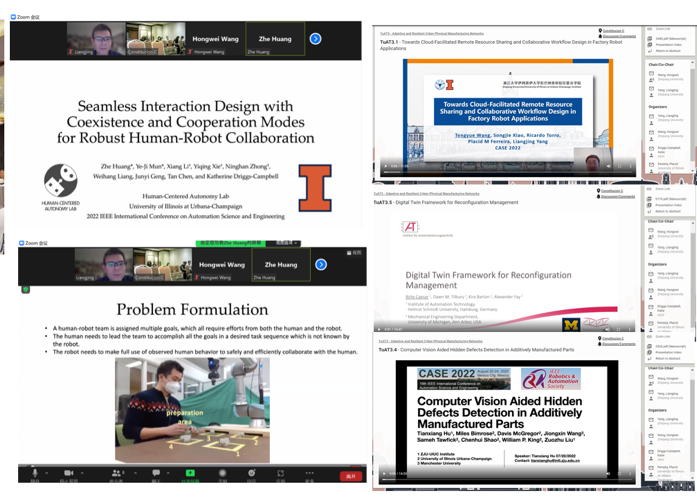
▲ The Special Session





